Rosa Mª Sánchez-Banderas
Portfolio
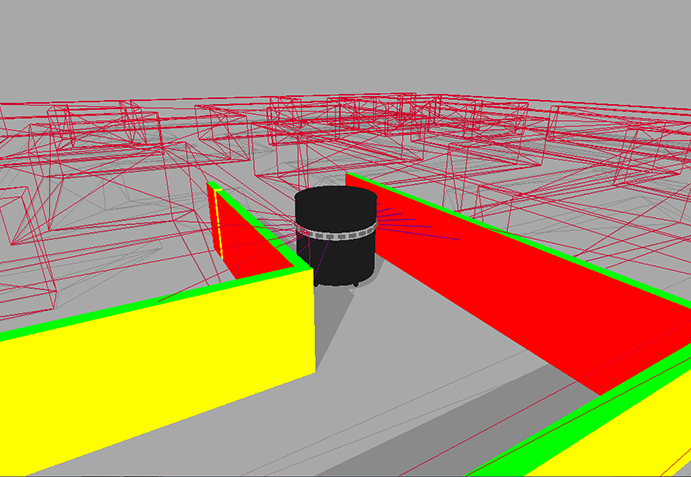
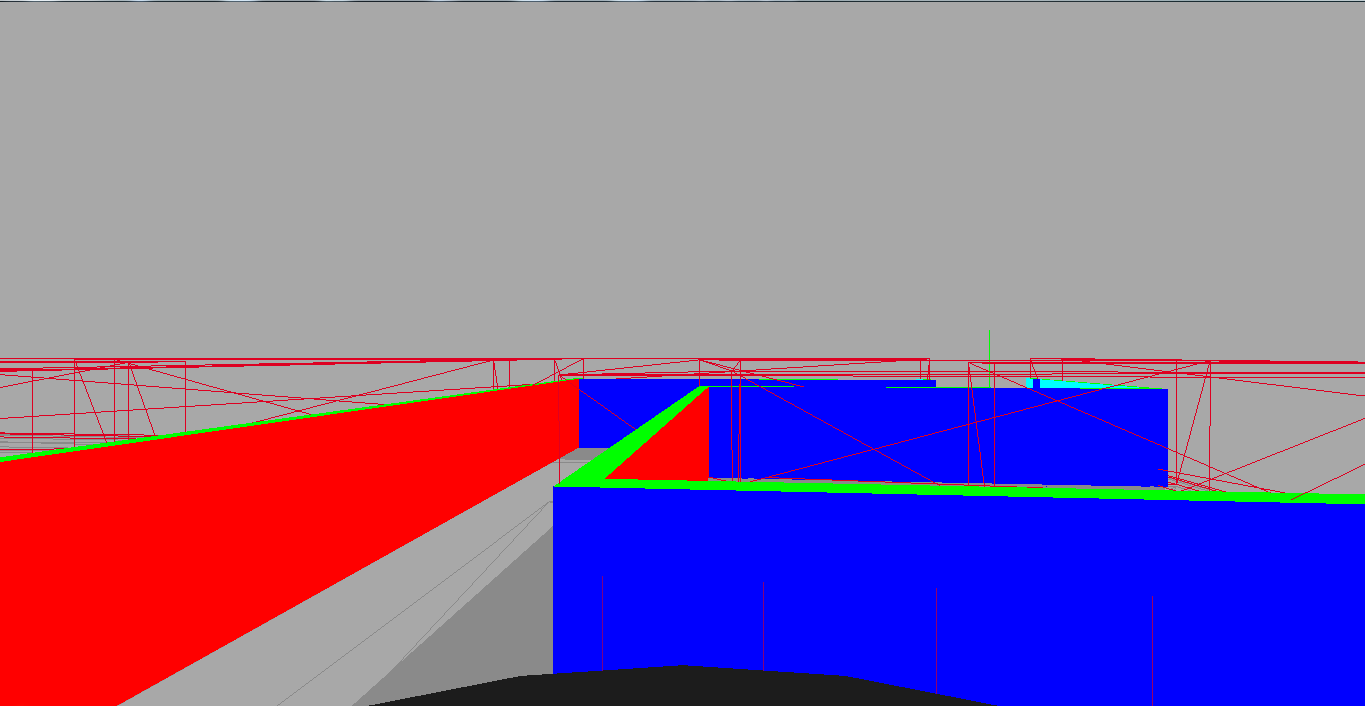
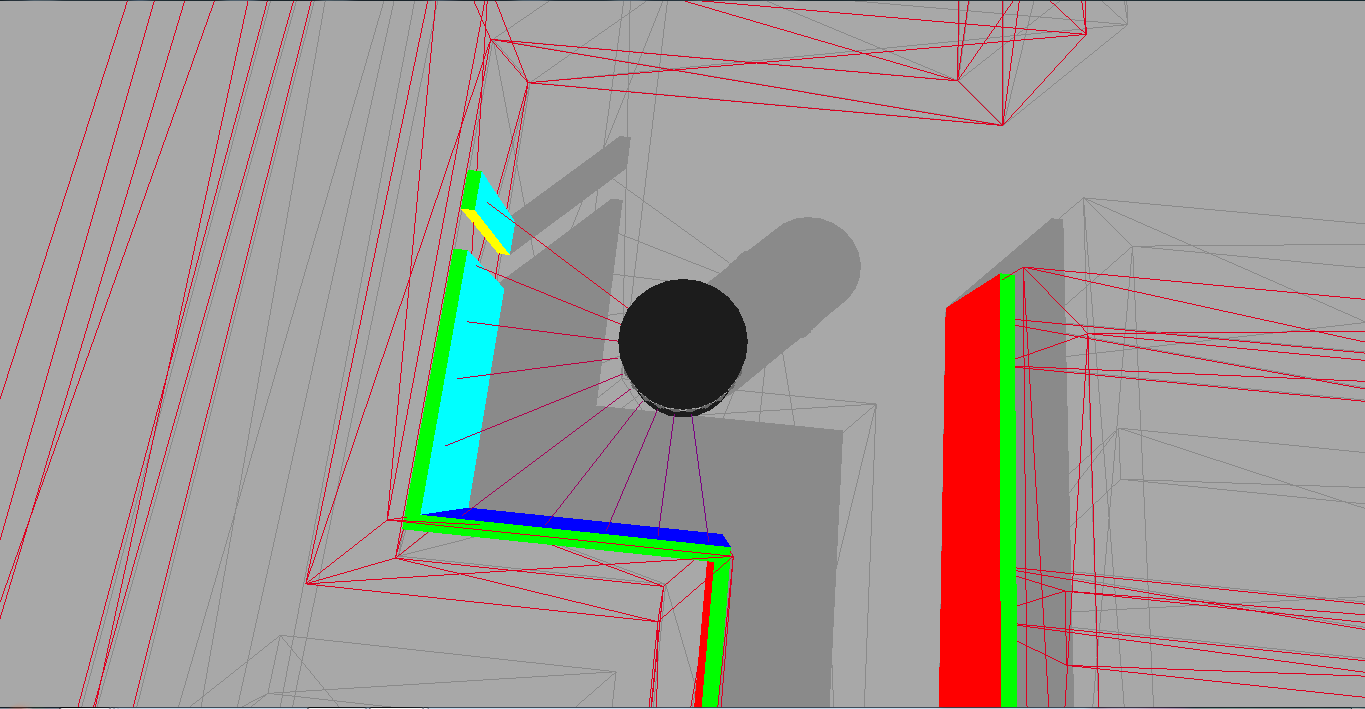
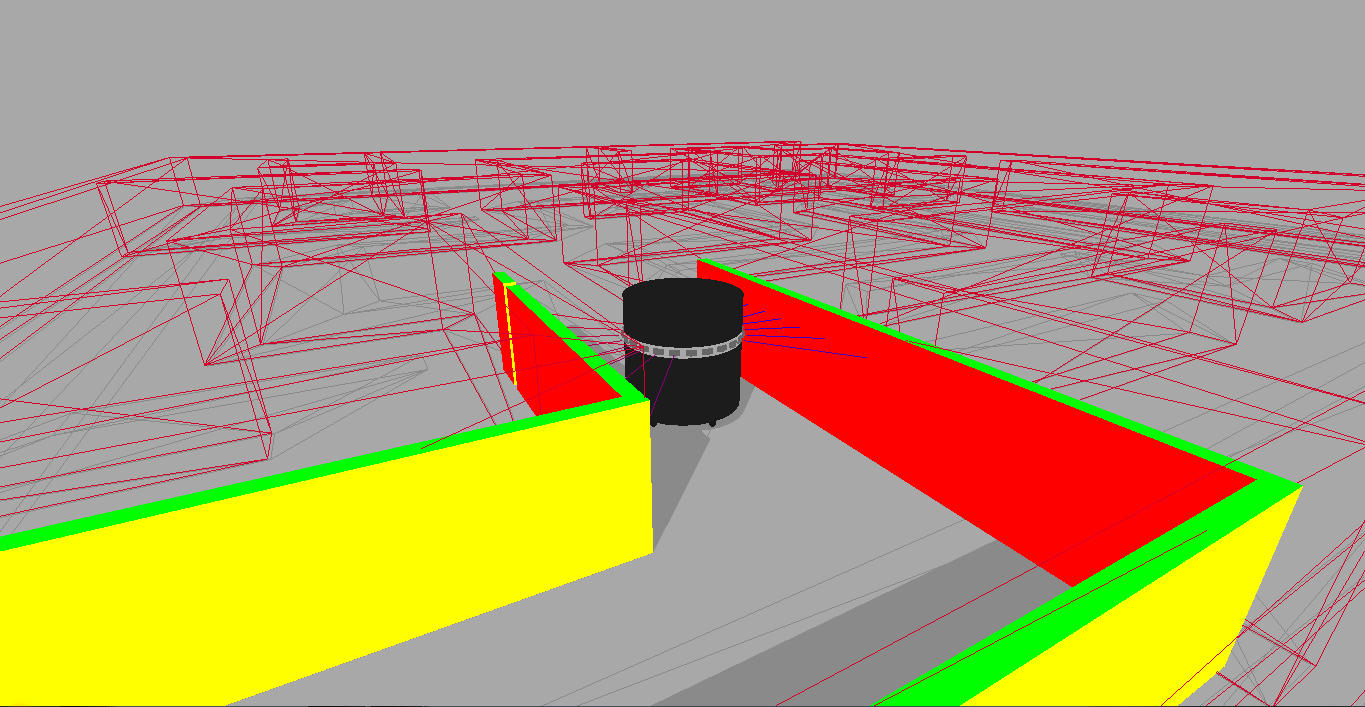
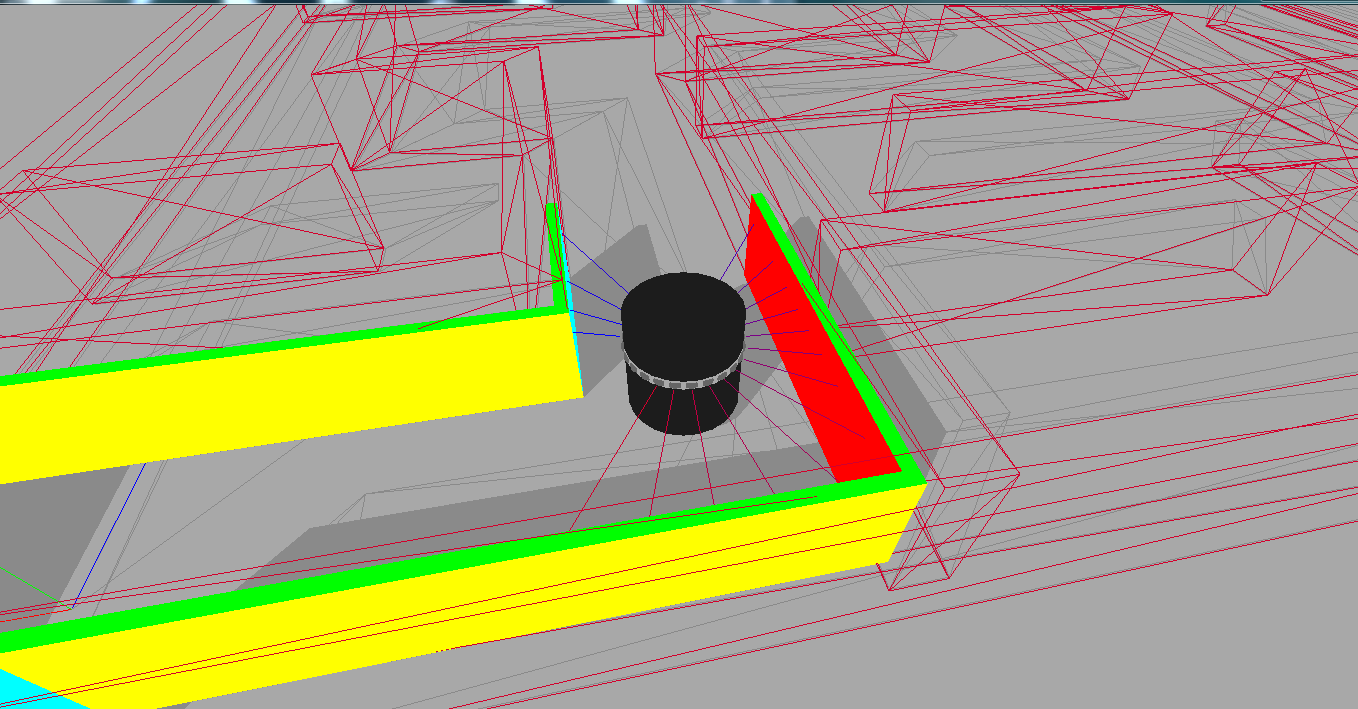
A simulation of a real robot that's able to recognise the environment and detect the obstacles around them, thanks to a set of sensors. The simulator lets the user control this robot by moving it around the environment and changing the camera's point of view. The robot generates a map of obstacles, based on the sensors feedback. As test cases, a maze and a classroom were used.